在汽車電子系統日益復雜化的今天,AUTOSAR(AUTomotive Open System ARchitecture,汽車開放系統架構)已成為行業標準,旨在實現軟件的可復用性、可互換性和可擴展性。其中,MCAL(Microcontroller Abstraction Layer,微控制器抽象層)作為AUTOSAR分層架構的基石,扮演著連接硬件與上層軟件的關鍵角色。本文將深入解析AUTOSAR MCAL軟件架構的基本概念及其提供的基礎軟件服務。
一、AUTOSAR MCAL的核心概念
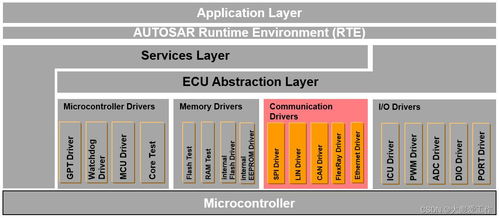
- 定義與定位:MCAL是AUTOSAR基礎軟件(BSW)的最底層,直接與微控制器(MCU)及其內部外設(如ADC、CAN、PWM、GPIO等)交互。其主要目標是實現硬件抽象,為上層的ECU抽象層(ECU Abstraction Layer)和復雜驅動(Complex Drivers)提供標準化的、與具體MCU型號無關的接口。這使得應用層軟件和大部分基礎軟件可以在不同的硬件平臺上移植和復用,極大地降低了開發成本和周期。
- 模塊化設計:MCAL并非一個單一的整體,而是由一系列獨立且高度模塊化的驅動(Drivers)組成。每個驅動負責管理MCU的一個特定硬件模塊或外設。例如:
- DIO驅動:用于控制數字輸入/輸出端口。
- ADC驅動:用于配置和讀取模數轉換器。
- PWM驅動:用于生成脈寬調制信號。
- CAN驅動:用于控制器局域網通信的底層配置與數據收發。
- SPI/I2C驅動:用于串行外設接口通信。
- MCU驅動:提供MCU的初始化、時鐘、電源模式和看門狗等核心服務。
- 標準API接口:所有MCAL模塊都遵循AUTOSAR標準定義的應用程序編程接口(API)。這些API是標準化的、靜態配置的(通常在配置階段通過工具如EB Tresos、DaVinci Configurator完成),確保了上層軟件調用的一致性。
二、MCAL的關鍵功能與基礎軟件服務
MCAL向上層軟件提供了一系列基礎且關鍵的服務,這些服務是汽車ECU功能正常運行的前提:
- 硬件初始化和配置服務:在ECU上電或復位后,MCAL模塊(尤其是MCU驅動)負責根據配置參數初始化MCU的核心系統(如時鐘樹、鎖相環PLL、內存保護單元MPU)以及各個外設,使其進入預定義的工作狀態。
- 數字/模擬I/O服務:通過DIO和ADC等驅動,提供讀取開關量信號、驅動執行器以及采集模擬傳感器信號(如溫度、壓力)的能力。這是ECU感知和控制物理世界的基礎。
- 定時與調度服務:通過GPT(通用定時器)驅動提供精確的定時、延時和周期觸發功能,為操作系統(OS)的調度和任務執行提供底層時間基準。
- 通信服務:為車載網絡(如CAN、LIN、FlexRay、以太網)和芯片間通信(如SPI)提供底層驅動。CAN驅動負責處理CAN控制器的配置、報文收發、硬件過濾和中斷處理,將復雜的硬件操作封裝成簡單的API。
- 存儲訪問服務:通過Fls(Flash驅動)和Fee(Flash EEPROM仿真)模塊,提供對內部或外部Flash存儲器的擦除、編程和讀取服務,支持數據存儲和程序更新。
- 安全與診斷服務:MCU驅動中的看門狗(WDT)管理、內存保護單元(MPU)配置等,為系統提供基本的運行監控和故障保護機制。
三、MCAL在AUTOSAR架構中的價值
- 硬件獨立性:將應用軟件與底層硬件解耦,使OEM和Tier1供應商能夠靈活選擇或更換MCU供應商,而無需重寫上層軟件。
- 提高軟件質量:標準化的接口和經過充分驗證的驅動模塊,提升了整個軟件系統的可靠性和穩定性。
- 提升開發效率:工程師可以專注于應用邏輯和集成,而無需深入鉆研每種MCU的寄存器手冊,工具鏈支持的自動配置也大幅減少了手動編碼的工作量。
###
AUTOSAR MCAL是汽車電子軟件架構的“地基”,其通過提供標準化、模塊化的硬件抽象層,將復雜的微控制器操作封裝成清晰、統一的接口。它所提供的基礎軟件服務,涵蓋了從I/O控制、定時管理到通信、存儲等各個方面,是上層復雜功能(如通信協議棧、診斷、狀態管理)得以構建和穩定運行的保障。深入理解MCAL的基本概念和其提供的服務,是進行高效、可靠的AUTOSAR標準軟件開發的必要條件。